|
|
This HTML version of Think Complexity, 2nd Edition is provided for convenience, but it is not the best format of the book.
In particular, some of the symbols are not rendered correctly.
You might prefer to read the PDF version.
Chapter 10 Herds, Flocks, and Traffic Jams
The agent-based models in the previous chapter are based on grids: the agents occupy discrete locations in two-dimensional space. In this chapter we consider agents that move is continuous space, including simulated cars on a one-dimensional highway and simulated birds in three-dimensional space.
The code for this chapter is in chap10.ipynb, which is a
Jupyter notebook in the repository for this book. For more information
about working with this code, see Section ??.
10.1 Traffic jams
What causes traffic jams? Sometimes there is an obvious cause,
like an accident, a speed trap, or something else that disturbs
the flow of traffic. But other times traffic jams appear for no
apparent reason.
Agent-based models can help explain spontaneous traffic jams.
As an example, I implement a highway simulation based on
a model in Mitchell Resnick’s book, Turtles, Termites and Traffic Jams.
Here’s the class that represents the “highway”: | class Highway:
def __init__(self, n=10, length=1000, eps=0):
self.length = length
self.eps = eps
# create the drivers
locs = np.linspace(0, length, n, endpoint=False)
self.drivers = [Driver(loc) for loc in locs]
# and link them up
for i in range(n):
j = (i+1) % n
self.drivers[i].next = self.drivers[j] |
n is the number of cars, length is the length of the
highway, and eps is the amount of random noise we’ll add to the system.
locs contains the locations of the drivers; the NumPy function linspace creates an array of n locations equally spaced between 0 and length.
The drivers attribute is a list of Driver objects. The for loop links them so each Driver contains a reference to the next. The highway is circular, so the last Driver contains a reference to the first. During each time step, the Highway moves each of the drivers: | # Highway
def step(self):
for driver in self.drivers:
self.move(driver) |
The move method lets the Driver choose its acceleration. Then move computes the updated speed and position. Here’s the implementation: | # Highway
def move(self, driver):
dist = self.distance(driver)
# let the driver choose acceleration
acc = driver.choose_acceleration(dist)
acc = min(acc, self.max_acc)
acc = max(acc, self.min_acc)
speed = driver.speed + acc
# add random noise to speed
speed *= np.random.uniform(1-self.eps, 1+self.eps)
# keep it nonnegative and under the speed limit
speed = max(speed, 0)
speed = min(speed, self.speed_limit)
# if current speed would collide, stop
if speed > dist:
speed = 0
# update speed and loc
driver.speed = speed
driver.loc += speed |
dist is the distance between driver and the next driver ahead.
This distance is passed to choose_acceleration, which
specifies the behavior of the driver. This is the only decision the
driver gets to make; everything else is determined by the “physics”
of the simulation.
acc is acceleration, which is bounded by min_acc and
max_acc. In my implementation, cars can accelerate with
max_acc=1 and brake with min_acc=-10.speed is the old speed plus the requested acceleration, but
then we make some adjustments. First, we add random noise to
speed, because the world is not perfect. eps determines the magnitude of the relative error; for example, if eps is 0.02, speed is multiplied by a random factor between 0.98 and 1.02.- Speed is bounded between 0 and
speed_limit, which is
40 in my implementation, so cars are not allowed to go backward or speed. - If the requested speed would cause a collision with the next car,
speed is set to 0. - Finally, we update the
speed and loc attributes of driver.
Here’s the definition for the Driver class: | class Driver:
def __init__(self, loc, speed=0):
self.loc = loc
self.speed = speed
def choose_acceleration(self, dist):
return 1 |
The attributes loc and speed are the location and speed of the
driver. This implementation of choose_acceleration is simple:
it always accelerates at the maximum rate. Since the cars start out equally spaced, we expect them all to
accelerate until they reach the speed limit, or until their speed
exceeds the space between them. At that point, at least one
“collision” will occur, causing some cars to stop.
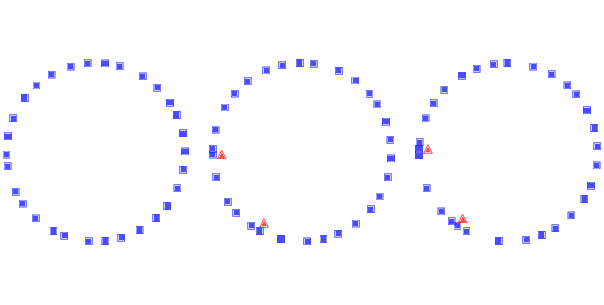
| Figure 10.1: Simulation of drivers on a circular highway at three points in time. Squares indicate the position of the drivers; triangles indicate places where one driver has to brake to avoid another. |
Figure ?? shows a few steps in this process, starting with
30 cars and eps=0.02. On the left is the configuration after
16 time steps, with the highway mapped to a circle.
Because of random noise, some cars are going faster
than others, and the spacing has become uneven. During the next time step (middle) there are two collisions, indicated
by the triangles. During the next time step (right) two cars collide with the stopped
cars, and we can see the initial formation of a traffic jam. Once
a jam forms, it tends to persist, with additional cars approaching from
behind and colliding, and with cars in the front accelerating
away. Under some conditions, the jam itself propagates backwards, as you
can see if you watch the animations in the notebook for this chapter.
10.2 Random perturbation
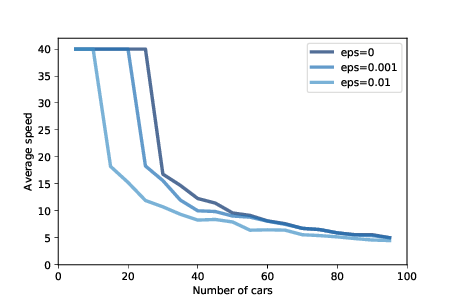
| Figure 10.2: Average speed as a function of the number of cars, for three magnitudes of added random noise. |
As the number of cars increases, traffic jams become more severe.
Figure ?? shows the average speed cars are able to
achieve, as a function of the number of cars.
The top line shows results with eps=0, that is, with no random
variation in speed. With 25 or fewer cars, the spacing between
cars is greater than 40, which allows cars to reach and maintain
the maximum speed, which is 40. With more than 25 cars, traffic
jams form and the average speed drops quickly. This effect is a direct result of the physics of the simulation,
so it should not be surprising. If the length of the road is
1000, the spacing between n cars is 1000/n. And since cars
can’t move faster than the space in front of them, the highest
average speed we expect is 1000/n or 40, whichever is less. But that’s the best case scenario. With just a small amount of
randomness, things get much worse. Figure ?? also shows results with eps=0.001 and
eps=0.01, which correspond to errors in speed of 0.1% and 1%. With 0.1% errors, the capacity of the highway
drops from 25 to 20 (by “capacity” I mean the maximum number
of cars that can reach and sustain the speed limit). And
with 1% errors, the capacity drops to 10. Ugh. As one of the exercises at the end of this chapter, you’ll have a
chance to design a better driver; that is, you will experiment with
different strategies in choose_acceleration and see if you can
find driver behaviors that improve average speed.
10.3 Boids
In 1987 Craig Reynolds published “Flocks, herds and
schools: A distributed behavioral model”, which describes an
agent-based model of herd behavior. You can download his
paper from http://thinkcomplex.com/boid.
Agents in this model are called “Boids”, which is both a
contraction of “bird-oid” and an accented pronunciation of “bird”
(although Boids are also used to model fish and herding land animals).
Each agent simulates three behaviors: - Flock centering:
- Move toward the center of the flock.
- Collision avoidance:
- Avoid obstacles, including other Boids.
- Velocity matching:
- Align velocity (speed and direction) with neighboring Boids.
Boids make decisions based on local information only; each Boid
only sees (or pays attention to) other Boids in its field of
vision.
In the repository for this book, you will find Boids7.py, which contains my implementation of Boids, based in part
on the description in Gary William Flake’s book, The Computational Beauty of Nature.
My implementation uses VPython, which is a library that provides 3-D graphics.
VPython provides a Vector object, which I use to represent the position and velocity of Boids in three dimensions. You can read about them at http://thinkcomplex.com/vector.
10.4 The Boid algorithm
Boids7.py defines two classes: Boid, which implements the Boid
behaviors, and World, which contains a list of Boids and a
“carrot” the Boids are attracted to.
The Boid class defines the following methods: center: Finds other Boids within range and computes a vector
toward their centroid.
avoid: Finds objects, including other Boids, within a given range,
and computes a vector that points away from their centroid.align: Finds other Boids within range and computes the average of their headings.love: Computes a vector that points toward the carrot.
Here’s the implementation of center: | def center(self, boids, radius=1, angle=1):
neighbors = self.get_neighbors(boids, radius, angle)
vecs = [boid.pos for boid in neighbors]
return self.vector_toward_center(vecs) |
The parameters radius and angle are the radius and angle of
the field of view, which determines which other Boids are taken into consideration. radius is in arbitrary units of length; angle is in radians. center uses get_neighbors to get a list of Boid objects that are in the field of view. vecs is a list of Vector objects that represent their positions.
Finally, vector_toward_center computes a Vector that points from self to the centroid of neighbors.
Here’s how get_neighbors works: | def get_neighbors(self, boids, radius, angle):
neighbors = []
for boid in boids:
if boid is self:
continue
# if not in range, skip it
offset = boid.pos - self.pos
if offset.mag > radius:
continue
# if not within viewing angle, skip it
if self.vel.diff_angle(offset) > angle:
continue
# otherwise add it to the list
neighbors.append(boid)
return neighbors |
For each other Boid, get_neighbors uses vector subtraction to compute the
vector from self to boid. The magnitude of this vector is the distance between them; if this magnitude exceeds radius, we ignore boid.
diff_angle computes the angle between the velocity of self, which points in the direction the Boid is heading, and the position of boid.
If this angle exceeds angle, we ignore boid.
Otherwise boid is in view, so we add it to neighbors. Now here’s the implementation of vector_toward_center, which computes a vector from self to the centroid of its neighbors. | def vector_toward_center(self, vecs):
if vecs:
center = np.mean(vecs)
toward = vector(center - self.pos)
return limit_vector(toward)
else:
return null_vector |
VPython vectors work with NumPy, so np.mean computes the mean of vecs, which is a sequence of vectors. limit_vector limits the magnitude of the result to 1; null_vector has magnitude 0.
We use the same helper methods to implement avoid: | def avoid(self, boids, carrot, radius=0.3, angle=np.pi):
objects = boids + [carrot]
neighbors = self.get_neighbors(objects, radius, angle)
vecs = [boid.pos for boid in neighbors]
return -self.vector_toward_center(vecs) |
avoid is similar to center, but it takes into account the carrot as well as the other Boids. Also, the parameters are different: radius is smaller, so Boids only avoid objects that are too close, and angle is wider, so Boids avoid objects from all directions. Finally, the result from vector_toward_center is negated, so it points away from the centroid of any objects that are too close.
Here’s the implementation of align: | def align(self, boids, radius=0.5, angle=1):
neighbors = self.get_neighbors(boids, radius, angle)
vecs = [boid.vel for boid in neighbors]
return self.vector_toward_center(vecs) |
align is also similar to center; the big difference is that it computes the average of the neighbors’ velocities, rather than their positions. If the neighbors point in a particular direction, the Boid tends to steer toward that direction.
Finally, love computes a vector that points in the direction of the carrot. | def love(self, carrot):
toward = carrot.pos - self.pos
return limit_vector(toward) |
The results from center, avoid, align, and love are what Reynolds calls “acceleration requests", where each request is intended to achieve a different goal.
10.5 Arbitration
To arbitrate among these possibly conflicting goals, we compute a weighted sum of the four requests:
| def set_goal(self, boids, carrot):
w_avoid = 10
w_center = 3
w_align = 1
w_love = 10
self.goal = (w_center * self.center(boids) +
w_avoid * self.avoid(boids, carrot) +
w_align * self.align(boids) +
w_love * self.love(carrot))
self.goal.mag = 1 |
w_center, w_avoid, and the other weights determine the importance of the acceleration requests. Usually w_avoid is relatively high and w_align is relatively low.
After computing a goal for each Boid, we update their velocity and position: | def move(self, mu=0.1, dt=0.1):
self.vel = (1-mu) * self.vel + mu * self.goal
self.vel.mag = 1
self.pos += dt * self.vel
self.axis = self.length * self.vel |
The new velocity is the weighted sum of the old velocity
and the goal. The parameter mu determines how quickly
the birds can change speed and direction. Then we normalize velocity so its magnitude is 1, and orient the axis of the Boid to point in the direction it is moving.
To update position, we multiply velocity by the time step, dt, to get the change in position. Finally, we update axis so the orientation of the Boid when it is drawn is aligned with its velocity.
Many parameters influence flock behavior, including the radius, angle
and weight for each behavior, as well as maneuverability, mu.
These parameters determine the ability of the Boids to form and
maintain a flock, and the patterns of motion and organization within the
flock. For some settings, the Boids resemble a flock of birds; other
settings resemble a school of fish or a cloud of flying insects. As one of the exercises at the end of this chapter, you can modify these parameters and see how they affect Boid behavior.
10.6 Emergence and free will
Many complex systems have properties, as a whole, that their components do not: - The Rule 30 cellular automaton is deterministic, and the rules
that govern its evolution are completely known. Nevertheless, it
generates a sequence that is statistically indistinguishable from
random.
- The agents in Schelling’s model are not racist, but the outcome
of their interactions is a high degree of segregation.
- Agents in Sugarscape form waves that move diagonally even
though the agents cannot.
- Traffic jams move backward even though the cars in them are
moving forward.
- Flocks and herds behave as if they are centrally organized even though the animals in them are making individual decisions based on local information.
These examples suggest an approach to several old and challenging questions, including the problems of consciousness and free will.
Free will is the ability to make choices, but if our bodies and brains
are governed by deterministic physical laws, our choices are completely determined. Philosophers and scientists have proposed many possible resolutions to this apparent conflict; for example: - William James proposed a two-stage model in which
possible actions are generated by a random process and then selected
by a deterministic process. In that case our actions are
fundamentally unpredictable because the process that generates them
includes a random element.
- David Hume suggested that our perception of making choices
is an illusion; in that case, our actions are deterministic because
the system that produces them is deterministic.
These arguments reconcile the conflict in opposite ways, but they agree that there is a conflict: the system cannot have free will if the parts are deterministic. The complex systems in this book suggest the alternative that free will, at the level of options and decisions, is compatible with determinism at the level of neurons (or some lower level). In the same way that a traffic jam moves backward while the cars move forward, a person can have free will even though neurons don’t.
10.7 Exercises
The code for the traffic jam simulation is in the Jupyter notebook chap09.ipynb in the repository for this book. Open this notebook, read the code, and run the cells. You can use this notebook to work on the following
exercise. My solutions are in chap09soln.ipynb. Exercise 1 In the traffic jam simulation, define a class, BetterDriver, that inherits from Driver and overrides choose_acceleration. See if you can define driving rules that do better than the basic implementation in Driver. You might try to achieve higher average speed, or a lower number of collisions. Exercise 2 The code for my Boid implementation is in Boids7.py in the repository for this book. To run it, you will need VPython, a library for 3-D graphics and animation. If you use Anaconda (as I recommend in Section ??), you can run the following in a terminal or Command Window: | conda install -c vpython vpython |
Then run Boids7.py. It should either launch a browser or create a window in a running browser, and create an animated display showing Boids, as white cones, circling a red sphere, which is the carrot. If you click and move the mouse, you can move the carrot and see how the Boids react. Read the code to see how the parameters control Boid behaviors. Experiment with different parameters. What happens if you “turn off” one
of the behaviors by setting its weight to 0?
To generate more bird-like behavior, Flake suggests adding a behavior to maintain a clear line of sight; in other words, if there is another bird directly ahead, the Boid should move away laterally. What effect do you expect this rule to have on the behavior of the flock? Implement it and see. Exercise 3 Read more about free will at http://thinkcomplex.com/will. The view that free will is compatible with determinism is called compatibilism. One of the strongest challenges to compatibilism is the “consequence
argument”. What is the consequence argument? What response can you
give to the consequence argument based on what you have read in this
book?
|
Buy this book at Amazon.com
Contribute
If you would like to make a contribution to support my books,
you can use the button below and pay with PayPal. Thank you!
Are you using one of our books in a class? We'd like to know
about it. Please consider filling out this short survey.
Think DSP


Think Java


Think Bayes


Think Python 2e


Think Stats 2e


Think Complexity


|